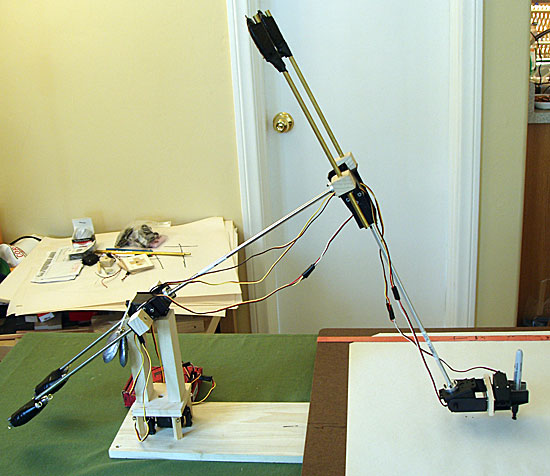
Created as a graduate project by Eric Newman. The DrawBot was created to emulate the emulate the movement of the mouse. The DrawBot is controlled via a HID USB interface, using a Microchips PIC 18F4550 microprocessor to control everything. By using the HID interface the DrawBot can be programed to draw premade patterns of different coordinates or it could simply be controlled using a joystick or mouse. The DrawBot consists of five joints controlled by Futaba S3305 servos. The Futuba servos give the arm the stability and movement it needs. Be sure to check out the video on the website.